
Communication-Aware Multi-Agent Exploration under Uncertainty
Overview
In real-world exploration tasks, communication constraints pose significant challenges for multi-agent systems, often leading to delayed or incomplete information and suboptimal decisions.
I am interested in how agents can proactively balance information aggregation (coming together to share knowledge) and distributed exploration (spreading out to accelerate coverage), making strategic decisions on when to connect, disconnect, or explore independently, even under limited or lossy communication conditions.
Focus Project: Learning-Based Exploration with Map Prediction and Graph Reasoning
(Joint work with Yizhuo Wang and Derek Ming Siang Tan)
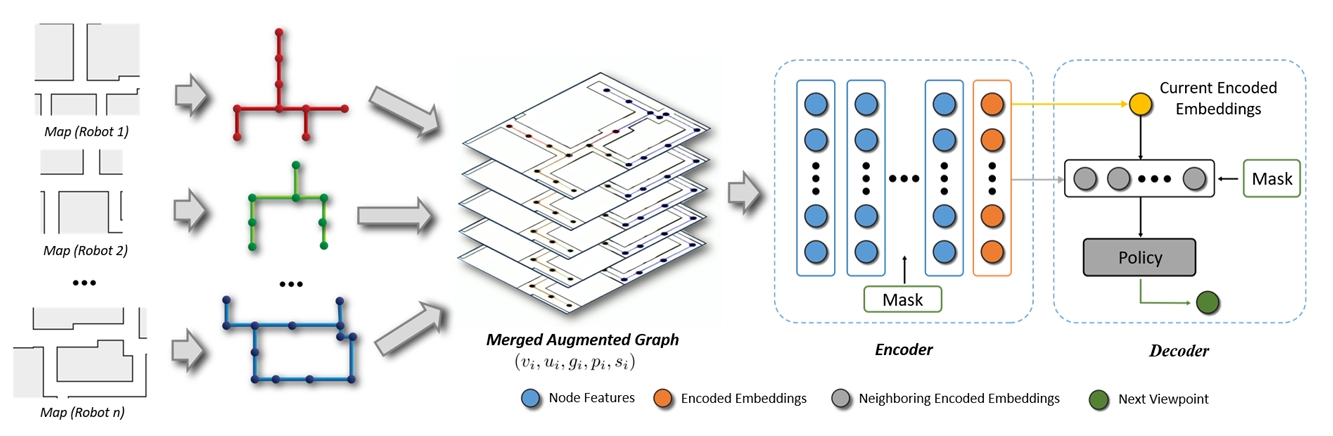
To address these challenges, I am developing a learning-based framework that combines map prediction, graph neural networks, and deep reinforcement learning.
This allows agents to reason over predicted layouts and communication states, enabling them to dynamically balance information aggregation and efficient exploration.
The approach is designed for deployment on real robots, using actual signal strength feedback to guide communication-aware exploration decisions.